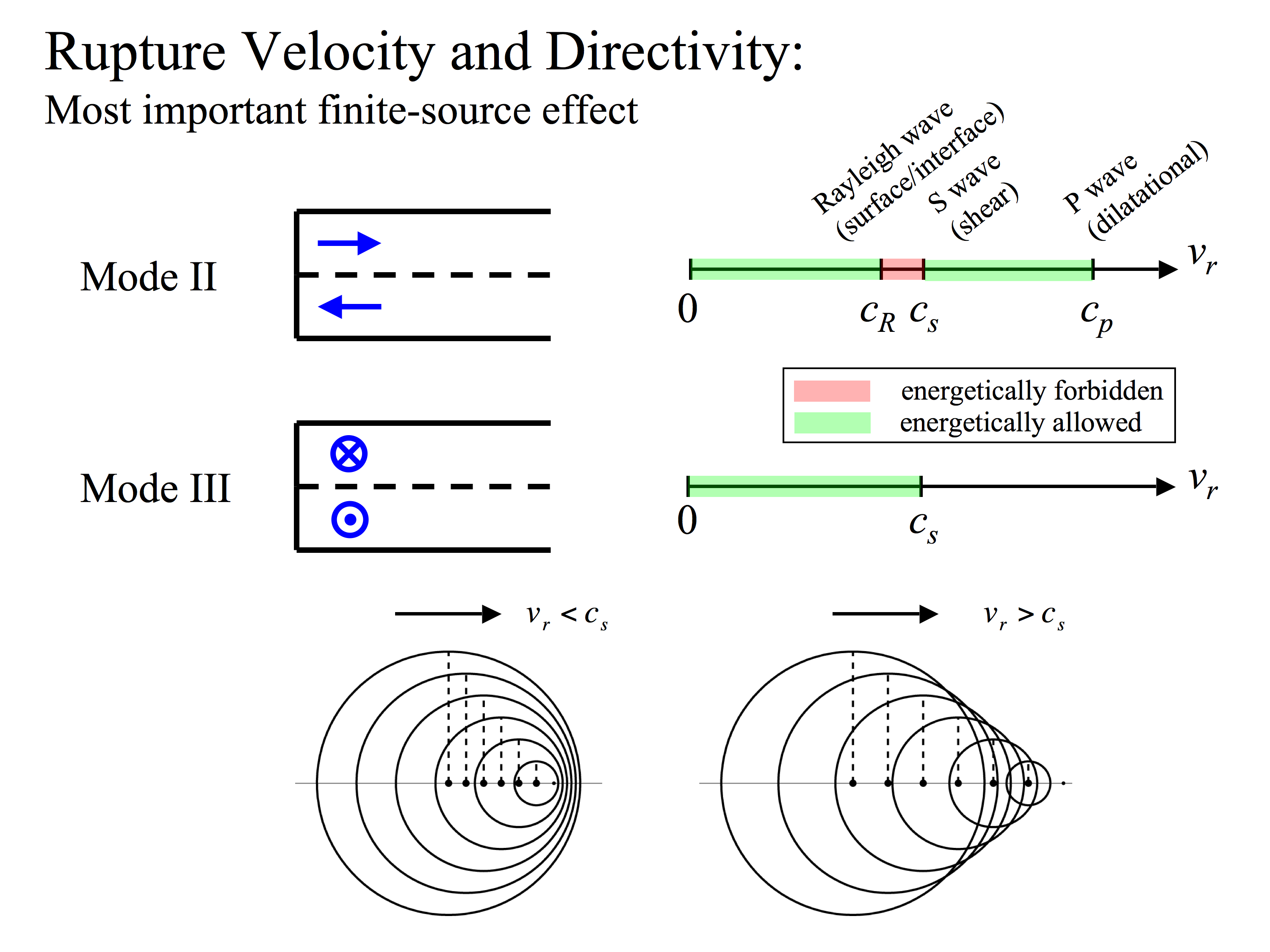
 Fig. 1: Permissible values of the rupture speed, vr, are determined by the rupture mode. There are two modes of shear rupture, which are distinguished by the direction of slip relative to the rupture front. In the diagram on the left, the blue arrows indicate the displacement of the two sides of the fault (the fault is the dashed line). Slip in mode III ruptures excites only shear waves, so the S-wave speed, cs, becomes the limiting rupture speed in this geometry. Mode II slip generates both shear and dilational waves, which can interact in rather interesting ways (e.g., to produce Rayleigh surface waves). Mode II ruptures typically propagate below the Rayleigh speed, cR, but can also propagate at intersonic speeds (speeds between the S-wave speed, cs, and the P-wave speed, cp). The difficulty is that ruptures cannot propagate in the narrow speed range between cR and cs (mathematical solutions for such ruptures have the unphysical feature that energy flows out of the rupture front, rather than into it to be dissipated). Understanding how and why ruptures jump between sub-Rayleigh and intersonic speeds is one of my interests.
Fig. 1: Permissible values of the rupture speed, vr, are determined by the rupture mode. There are two modes of shear rupture, which are distinguished by the direction of slip relative to the rupture front. In the diagram on the left, the blue arrows indicate the displacement of the two sides of the fault (the fault is the dashed line). Slip in mode III ruptures excites only shear waves, so the S-wave speed, cs, becomes the limiting rupture speed in this geometry. Mode II slip generates both shear and dilational waves, which can interact in rather interesting ways (e.g., to produce Rayleigh surface waves). Mode II ruptures typically propagate below the Rayleigh speed, cR, but can also propagate at intersonic speeds (speeds between the S-wave speed, cs, and the P-wave speed, cp). The difficulty is that ruptures cannot propagate in the narrow speed range between cR and cs (mathematical solutions for such ruptures have the unphysical feature that energy flows out of the rupture front, rather than into it to be dissipated). Understanding how and why ruptures jump between sub-Rayleigh and intersonic speeds is one of my interests.
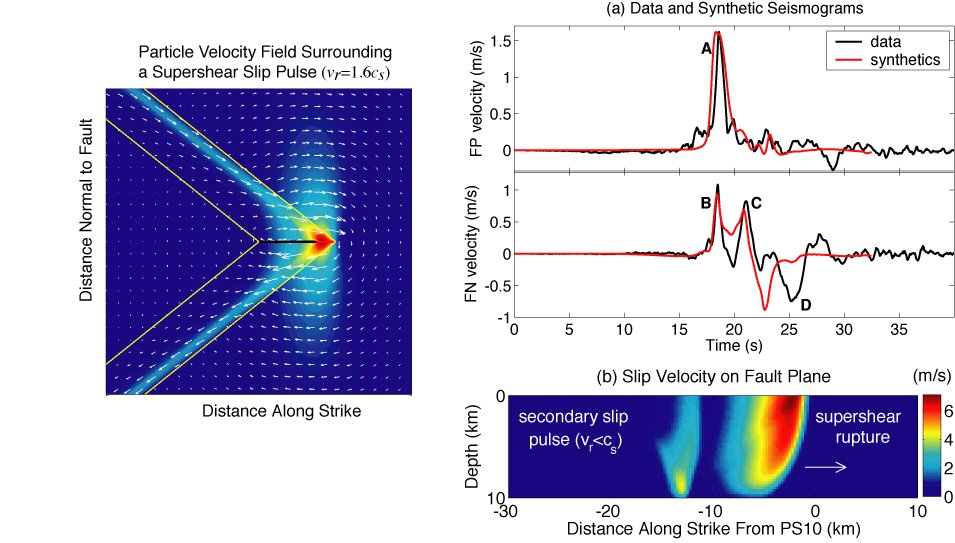
Rupture speed determines how waves from different parts of the fault interfere with each other. At the bottom of the figure are two diagrams illustrating this. They show shear wavefronts emitted when the rupture passes the solid dots. When the rupture is subshear (left), the wavefronts are concentrated in the forward direction and separated in the backward direction. This leads to larger amplitudes and higher frequencies in the forward direction. For supershear ruptures (right), the source outruns the waves and a Mach front is formed.
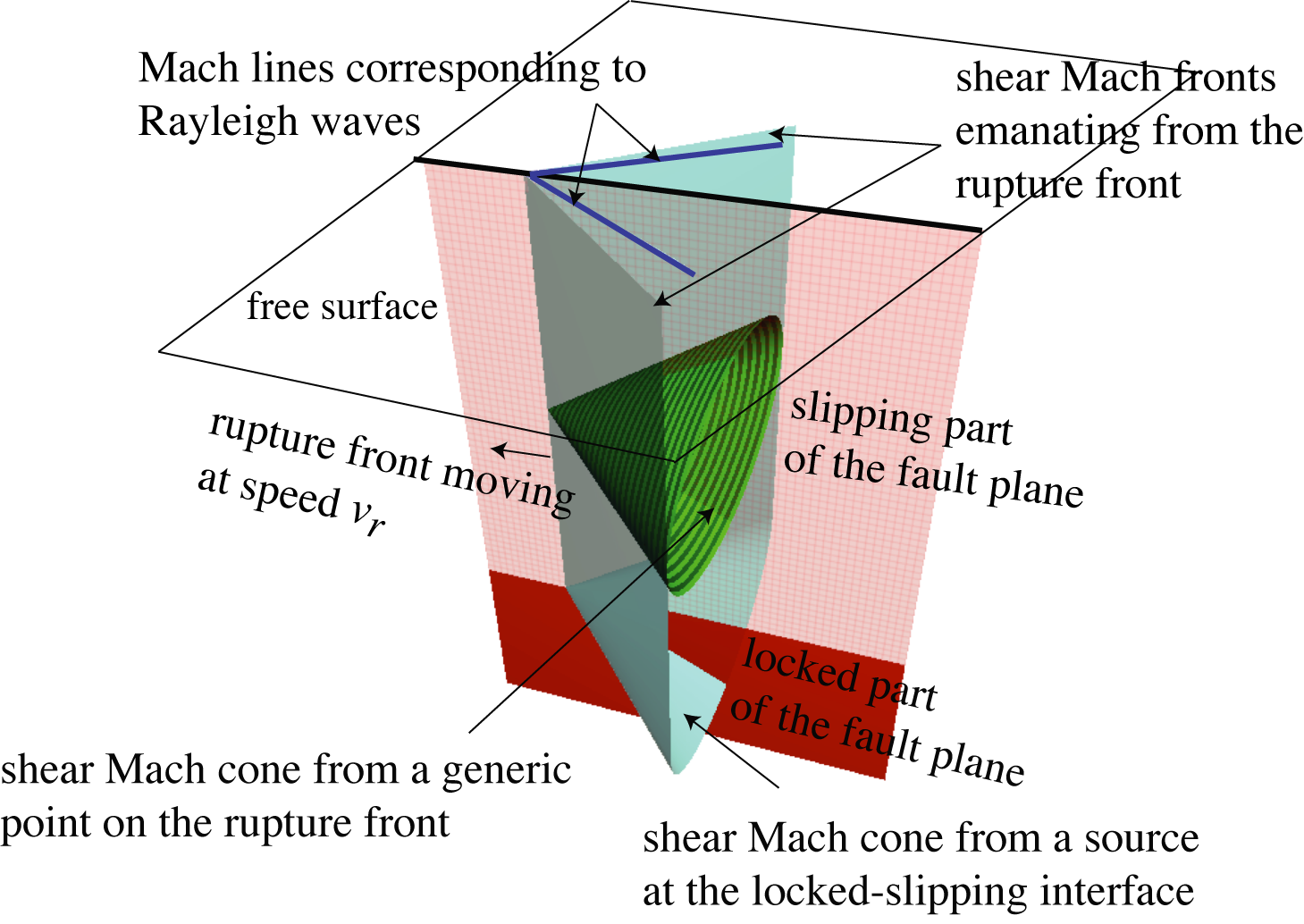 Fig. 2: Wavefronts from a three-dimensional supershear rupture on a surface-breaking fault. Each point along the rupture emanates shear waves in the form of a Mach cone (green). The superposition of waves from all points along the rupture front generates a Mach wedge capped at the bottom by half of a Mach cone (light blue). In addition to generating shear Mach waves, a surface breaking rupture also excites Rayleigh Mach waves. Rayleigh waves are surface waves comprised of evanescent shear and dilational waves; they propage at a speed slightly less than the S-wave speed. Consequently, a supershear source is also a super-Rayleigh one, so Rayleigh Mach fronts (dark blue lines) will appear on the free surface slightly behind the shear Mach fronts. These Rayleigh Mach waves were only recently recognized during a recent project together with Harsha Bhat.
Fig. 2: Wavefronts from a three-dimensional supershear rupture on a surface-breaking fault. Each point along the rupture emanates shear waves in the form of a Mach cone (green). The superposition of waves from all points along the rupture front generates a Mach wedge capped at the bottom by half of a Mach cone (light blue). In addition to generating shear Mach waves, a surface breaking rupture also excites Rayleigh Mach waves. Rayleigh waves are surface waves comprised of evanescent shear and dilational waves; they propage at a speed slightly less than the S-wave speed. Consequently, a supershear source is also a super-Rayleigh one, so Rayleigh Mach fronts (dark blue lines) will appear on the free surface slightly behind the shear Mach fronts. These Rayleigh Mach waves were only recently recognized during a recent project together with Harsha Bhat.